新闻动态
好书荐读|《小型无人飞行器卫星/微惯性组合高精度导航方法》
无人机导航的三大致命痛点,你遇到过吗?
城市峡谷里卫星信号突然中断,无人机瞬间“失明”?
微惯性器件误差累积,测绘数据越飞越偏?
复杂电磁环境下,导航系统抗干扰能力根本顶不住?
在无人机技术迅猛发展的今天,如何实现小型无人飞行器的高精度自主导航已成为业界关注的热点。在小型无人飞行器领域,“导航精度”始终是从业者绕不开的核心挑战——卫星信号受遮挡易失效,单一微惯性导航又存在误差累积问题。而《小型无人飞行器卫星/微惯性组合高精度导航方法》恰好瞄准这一痛点,为行业提供了系统性的技术解决方案,堪称相关领域研究者和工程师的“实用指南”。
一、内容简介
本书以小型无人飞行器自主飞行和全自动着陆(舰)为研究背景,旨在提升传统卫星/惯性组合的现有导航性能,开展高精度卫星/微惯性组合导航理论、方法和试验研究。
全书围绕“卫星 + 微惯性”组合导航技术展开,没有冗余理论,全是直击实际需求的干货。

1.拆解组合导航原理:清晰讲解卫星导航(如GPS、北斗)与微惯性导航的优势互补逻辑,让读者理解“1+1>2”的精度提升底层逻辑。
2.覆盖多场景应用方案:针对无人机巡检、测绘、应急救援等不同场景,给出定制化的组合导航参数设计、误差修正方法,直接可参考落地。
3.聚焦精度优化关键:深入分析微惯性器件漂移、卫星信号失锁等常见问题的解决策略,提供从算法设计到工程实现的完整思路。
二、本书特色
翻三页就上瘾:这才是工程师需要的技术手册
1.痛点靶向治疗,每个方案都带“解题步骤”,针对行业最头疼的三大难题,书中给出了完整解决方案。
信号遮挡?详解卫星/惯性紧密组合技术,让INS辅助增强卫星导航,即便是隧道、密林也能连续定位。
误差累积?给出卡尔曼滤波模型参数优化建议,实测可将MEMS-IMU漂移误差降低40%以上。
抗干扰弱?纳入多系统多频多类型观测信息融合方案,搭配自适应抗差滤波算法,复杂电磁环境下精度稳在亚米级。
2.理论不“飘”,全靠案例撑场子。
不同于同类书籍的纯公式堆砌,本书每章都配真实项目案例。
无人机电力巡检中,如何通过组合导航实现导线厘米级定位。
应急救援场景下,信号中断时的惯性导航续飞策略。
甚至公开了某型无人机着陆系统的导航参数调试流程。
3.避坑指南:提前预警行业常见错误,点出工程中最易踩的几大坑。
很多人忽略MEMS器件的随机误差精细建模与动态初始对准,导致与卫导信息融合时的导航误差估计性能急剧下降。
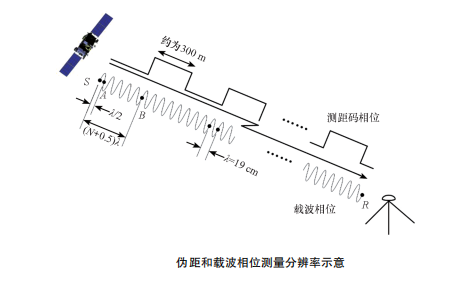
紧密组合引入载波相位时间差分观测信息,在正确处理误差相关性的条件下,可以进一步提高组合导航精度。
三、推荐理由
在无人机应用日益广泛的今天,高精度自主导航成为制约其性能的关键技术之一。本书针对小型无人飞行器的特殊需求,深入探讨了卫星/微惯性组合导航的前沿理论和方法,具有较高的学术价值和一定的实践指导意义。
本书不仅有助于读者掌握卫星/微惯性组合导航的基本理论,还能指导解决实际工程中的技术难题,是无人机导航领域一本不可多得的专业参考书。
四、图书推荐
《小型无人飞行器卫星/微惯性组合高精度导航方法》
王鼎杰、李青松、吴杰 著
ISBN:978-7-5673-0619-6
图书简介:
本书从理论基础到实际应用,全面系统地介绍了卫星/微惯性组合导航的关键技术,形成了完整的技术体系。针对微惯性器件随机误差精密建模、GNSS多系统建模、高维测量更新计算效率等难题,提出了有效的解决方案。书中包含了组合导航系统原理样机集成及性能实验验证,理论与实践紧密结合。

扫码阅读电子书